


センサ・アンプ・計測器
論文一覧
論文は国立情報学研究所のサービスであるCiNiiへリンクしています。
(リンクされていない論文に関してはJ-STAGEで検索をすることで閲覧が可能です)
| タイトル | 収録刊行物 |
|---|---|
| 足指マウス開発にむけての基礎的検討―母指の運動特性― | 生体医工学(2005) |
| 熟練奏者のバイオリン演奏時における左手指応力特性について | バイオメカニズム学術講演会予稿集(2010) |
| B6 グリップ性と走行パフォーマンス(シューズI) | シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集(2010) |
| B8 サッカースパイクのクリーツ形状設計のための基礎研究(シューズI) | シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集(2010) |
| B3 足部特性が走動作に及ぼす影響(足部特性,ほか) | シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集(2011) |
| B17 サッカースパイクソール設計のための基礎研究(シューズ設計) | シンポジウム: スポーツ・アンド・ヒューマン・ダイナミクス講演論文集(2011) |
| 大腿義足装着者の無拘束歩行計測に基づく生体力学的考察 | 日本機械学会論文集 C編(2011) |
| 無拘束歩行計測が可能な義足用6軸力覚センサの開発 | 日本機械学会論文集 C編(2011) |
| 1A1-R08 蚊の下唇を模倣した穿刺ガイドの作製とその評価(バイオミメティクス・バイオメカトロニクス(1)) | ロボティクス・メカトロニクス講演会講演概要集(2012) |
| 2A2-F05 手先力制御における筋協調解析(筋骨格モデリング) | ロボティクス・メカトロニクス講演会講演概要集(2012) |
| 側面設置型多指ハプティックインターフェイス | 計測自動制御学会論文集(2015) |
| 計算モデル化および力・モーメントの主成分の分析に基づく大腿義足歩行解析 | 日本機械学会論文集(2015) |
| 日常生活環境における大腿義足歩行の主要な下肢関節回転運動パターンの解析 | 日本機械学会論文集(2016) |
| 05バ−25−ポ−20 競泳キックスタートにおける力の測定 | 日本体育学会大会予稿集(2016) |
技術情報
注意事項
3軸力覚センサ全般について
- 落としたり、強い衝撃を与えないようにしてください。
- 修理不可能となりますので分解は行わないでください。
- 粉塵、水(水滴)に耐えられる構造となっておりません。
- 本センサは受圧部に加わるせん断力と垂直力の3分力を感知するようになっています。
回転モーメントや曲げモーメントなどが作用しないようにしてください。
~以下はセンサが壊れないモーメント許容値の目安です。~
※あくまで目安でありモーメントが発生する状況化での精度は補償致しかねます。
| 型式 | Mx(N・m) | My(N・m) | Mz(N・m) |
|---|---|---|---|
| USL06-H5-50N | 0.7 | 0.7 | 0.4 |
| USL06-H5-100N | 0.7 | 0.7 | 0.4 |
| USL06-H5-200N | 1 | 1 | 0.4 |
| USL06-H5-500N | 2 | 2 | 0.7 |
| USL08-H6-2KN | 5 | 5 | 5 |
| TL3B04-5KN | 70 | 70 | 90 |
- 温度補償範囲は、日々の気温変化には十分追従する能力が有ります。 ただし、直射熱が部分的に当たった場合、精度に影響することもありますので十分に注意してください。
- ケーブルを引張る、挟む、踏むなどに十分注意してください。また、ケーブル引出し口付近で曲げないでください。
- 取り付けの際には、許容過負荷(定格容量の120%)以上の負荷を与えないでください。
”USL06シリーズ”の注意事項
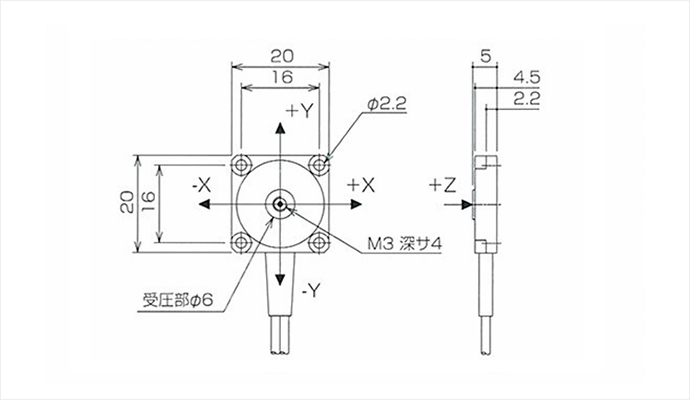
- M2用六角穴付ボルトを使用して4ヶ所を固定します。
設置面に凹凸があると、特性に影響して、破損する場合もありますので、設置する□20mm範囲の取り付け
面は、平面度0.01mm以下を推奨します。 - 被測定体は、本器中央のM3ネジ穴で固定します。
受圧面(Φ6)より深サ4mm以下のネジを使用してください。4.5mm以上で破損しますので十分に注意してください。
また、ネジで締め付けることは回転モーメントを与えることであり、締め付け過ぎると破損します。
M3ネジを締付ける際には、緩まない程度の強さで慎重に締め付けてください。
推奨締め付けトルクは下記のとおりです。
| 型式 | 奨励締め付けトルク |
|---|---|
| USL06-H5-50N | 40N・cm以下 |
| USL06-H5-100N | 40N・cm以下 |
| USL06-H5-200N | 40N・cm以下 |
| USL06-H5-500N | 70N・cm以下 |
設定手順について ~ USL06 → DSA-03A → DSS300-HR ~
セッティング時の注意事項
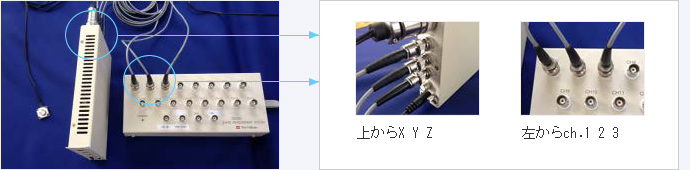
X:ch.1 Y:ch.2 Z:ch.3 となるようにケーブルを繋げます。
(センサ2台目からも同様に X:ch.4 Y:ch.5 Z:ch.6 …と繋げます。)
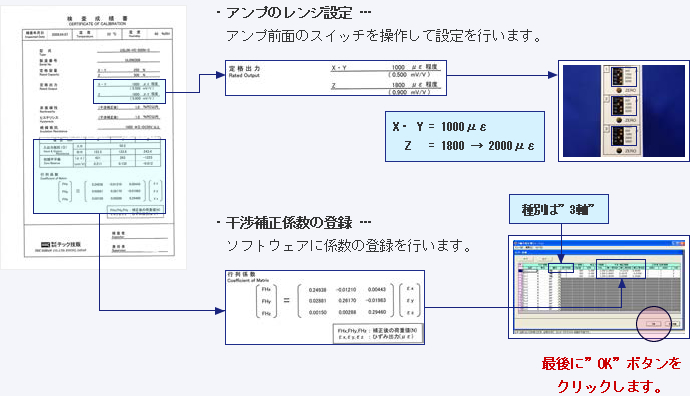
センサの検査成績書を参考にして、下記2つの設定を行います。
オートバランス(ゼロ調整)、キャリブレーションを行います。
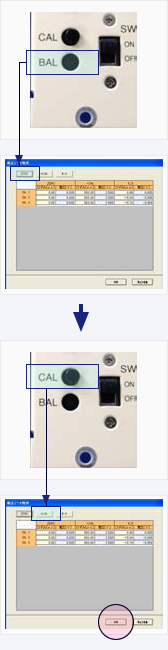
1)アンプ全面の”BAL”ボタンを長押し(2sec程)します。
(オートバランスが行われます。)これで計測が行えるようになります。
2)ソフトウエア(較正画面)の”ZERO”ボタンをクリックします。
(現在の数値をゼロ値として登録します。)
3)アンプ全面の”CAL”ボタンを押したまま、ソフトウエアの”+CAL”ボタンをクリックします。
(現在の数値を+CAL値として登録します。)
4)最後に”OK”ボタンをクリックします。
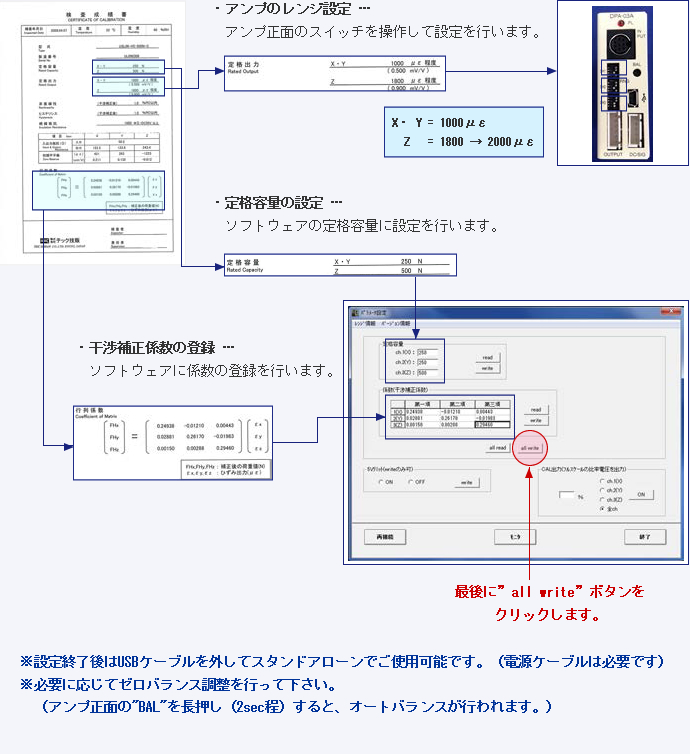
設定手順について ~ USL06 → DPA-03A ~
センサ[USL06]-アンプ[DPA-03A]
予め DPA-03Aコントロールソフトウェア をダウンロードしパソコンにインストールをしておきます。
その後、DPA-03AとパソコンをUSBケーブルで繋げ(初回のみドライバのインストールが必要です。)、
電源ケーブルより電気を投入後、ソフトウェアを起動します。
以降の内容で設定を行うと、電圧(V) = センサの定格出力 でアナログ出力が行われます。
センサの検査成績書を参考にして、下記2つの設定を行います。
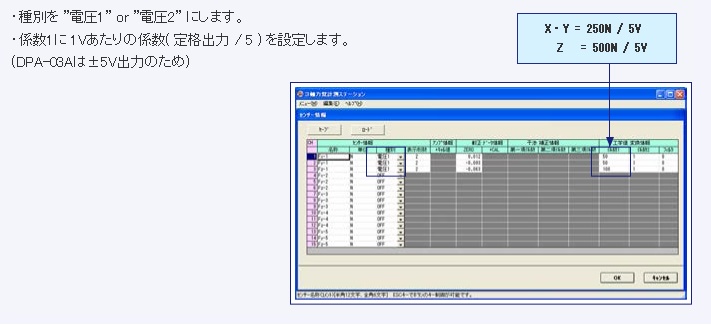
計測ソフトウエアにDSS300を使用する場合
【大学研究所関連ページ】
■東京大学(東京都):野崎大地教授(野崎研究室)との共同研究のご紹介 vol1 フォースプレート 発揮力・踏む力測定装置 動作解析
■東京大学(東京都):野崎大地教授(野崎研究室)との共同研究のご紹介 vol2 新型トレッドミル 歩行センサ・走行センサ 動作解析
■東京大学(東京都):野崎大地教授(野崎研究室)との共同研究のご紹介 vol3 9軸モーションセンサー競技用ボート アスリート スポーツ
■東京大学(東京都):医用精密工学研究室 佐久間先生・小林先生カーボン素材の微小荷重検出フォースプレート 摩擦計測 触覚計測
■東京医科歯科大学:大きなステップ動作の計測(スポーツ等)に適した大型のフォースプレート TF-6090
■鹿屋体育大学(鹿児島県):フォースプレート50m走行路システムと野球フォースプレート計測システム
■鹿屋体育大学(鹿児島県):スポーツパフォーマンス研究センター論文情報 競技用ボートアスリート
■藤田医科大学(愛知県):藤田医科大学との共同開発により誕生した「リハビリテーション」に特化した製品も開発を行いました。
■大阪大学(大阪府):健康スポーツ科学講座木下先生。世界最小クラスの小型3軸力覚センサ。スポーツ用具、福祉機器、ロボット開発などに!
■大阪体育大学(大阪府):石川研究室負荷制御型トレッドミルの動画を追加。フォースプレート内蔵型トレッドミルHPT型
■立命館大学(京都府):フォースプレート内蔵型トレッドミルHPT型
■同志社大学(京都府):フォースプレート内蔵型トレッドミルHPT型
■名古屋工業大学(愛知県):田中先生のご紹介でFabCafe 渋谷さまに「ゆびレコーダー」を展示いただくことになりました。
■近畿大学(大阪府):機械工学科五百井先生。世界最小クラスの小型3軸力覚センサ。スポーツ用具、福祉機器、ロボット開発などに!
■国立研究開発法人産業技術総合研究所(茨城県):フォースプレート内蔵型トレッドミルHPT型
■国立研究開発法人産業技術総合研究所(茨城県):保原浩明主任研究員 トレッドミル論文等情報
※株式会社テック技販は、京都府に本社がある日本国内計測器メーカーで、一般企業をはじめ、大学や研究所でも弊社製品をご使用いただいております。また、大学との共同開発も行っております。
多軸小型センサ・特殊ロードセル、計測器・データロガー、計測 制御ソフトウェア、試験 検査装置の設計、制作、特注品の製作など、お気軽にお問い合わせください。