


東京大学 野崎大地 教授との共同研究のご紹介 vol2
技術情報
東京大学 野崎教授のご研究室に新型トレッドミルシステムを新規に導入しました。
エルゴメーターやフォースプレートシステムも整備されました。
運動計測を総合的にできるラボとなっています。

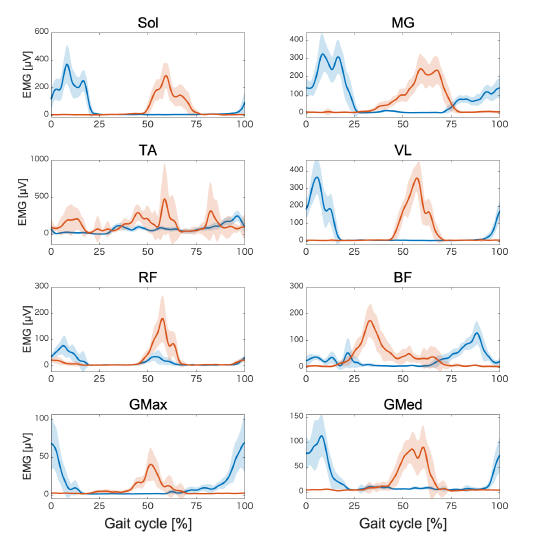
新型トレッドミルを用いた走動作パターンの評価
一定のベルト移動速度上で行う通常のトレッドミル歩行・走行では、 実際の歩行・走行における 随意的な速度調節や、走行動作に加速・減速を実装することは不可能です。
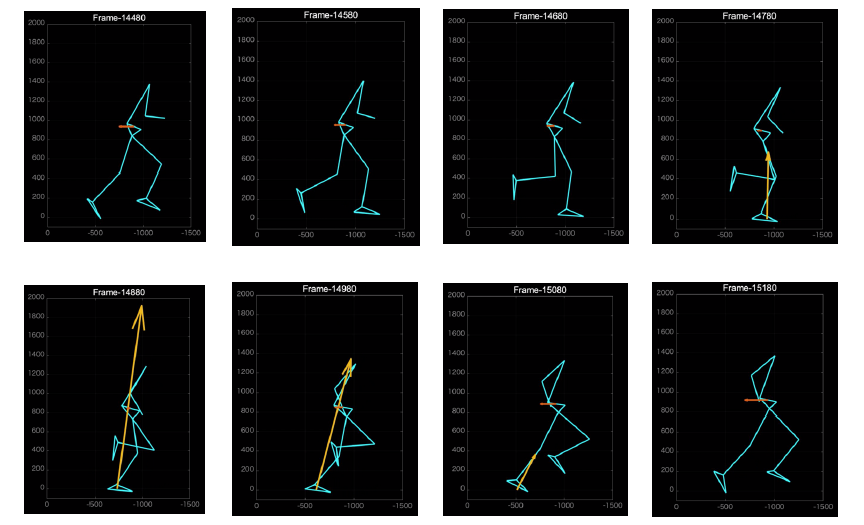
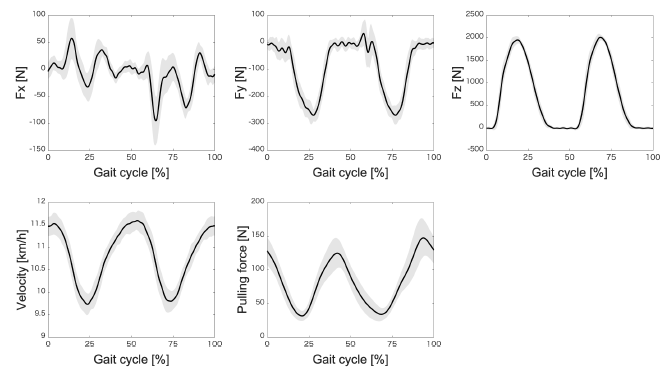
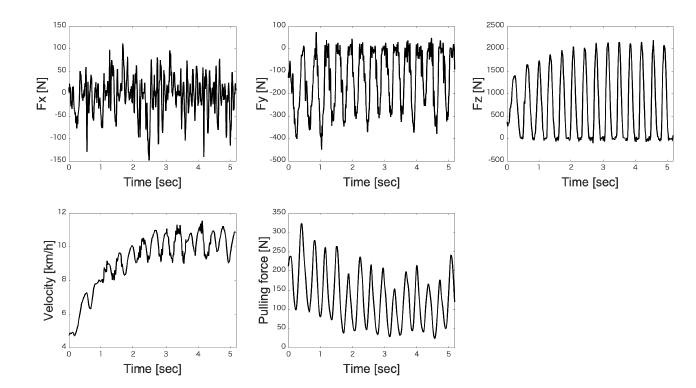
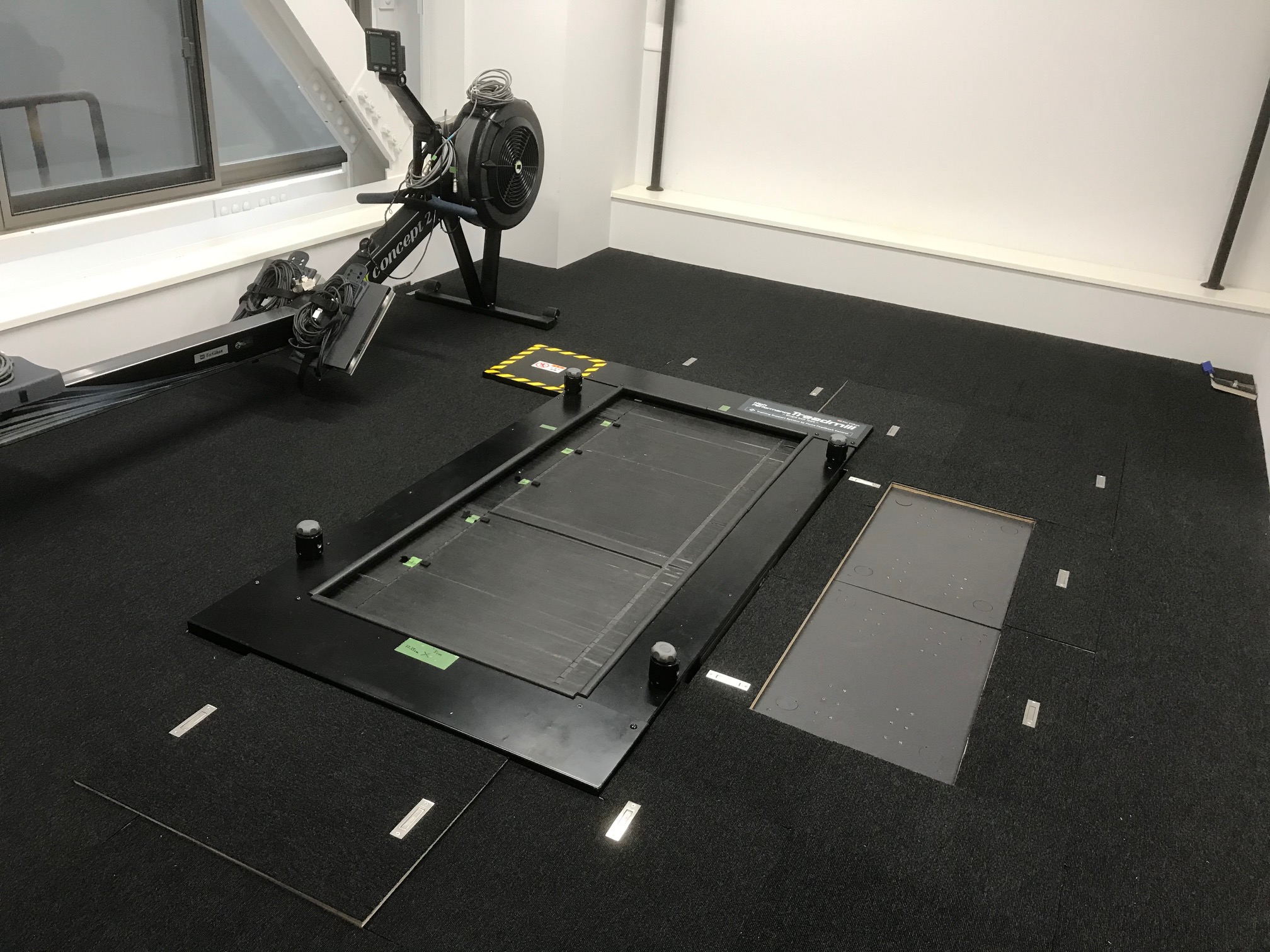
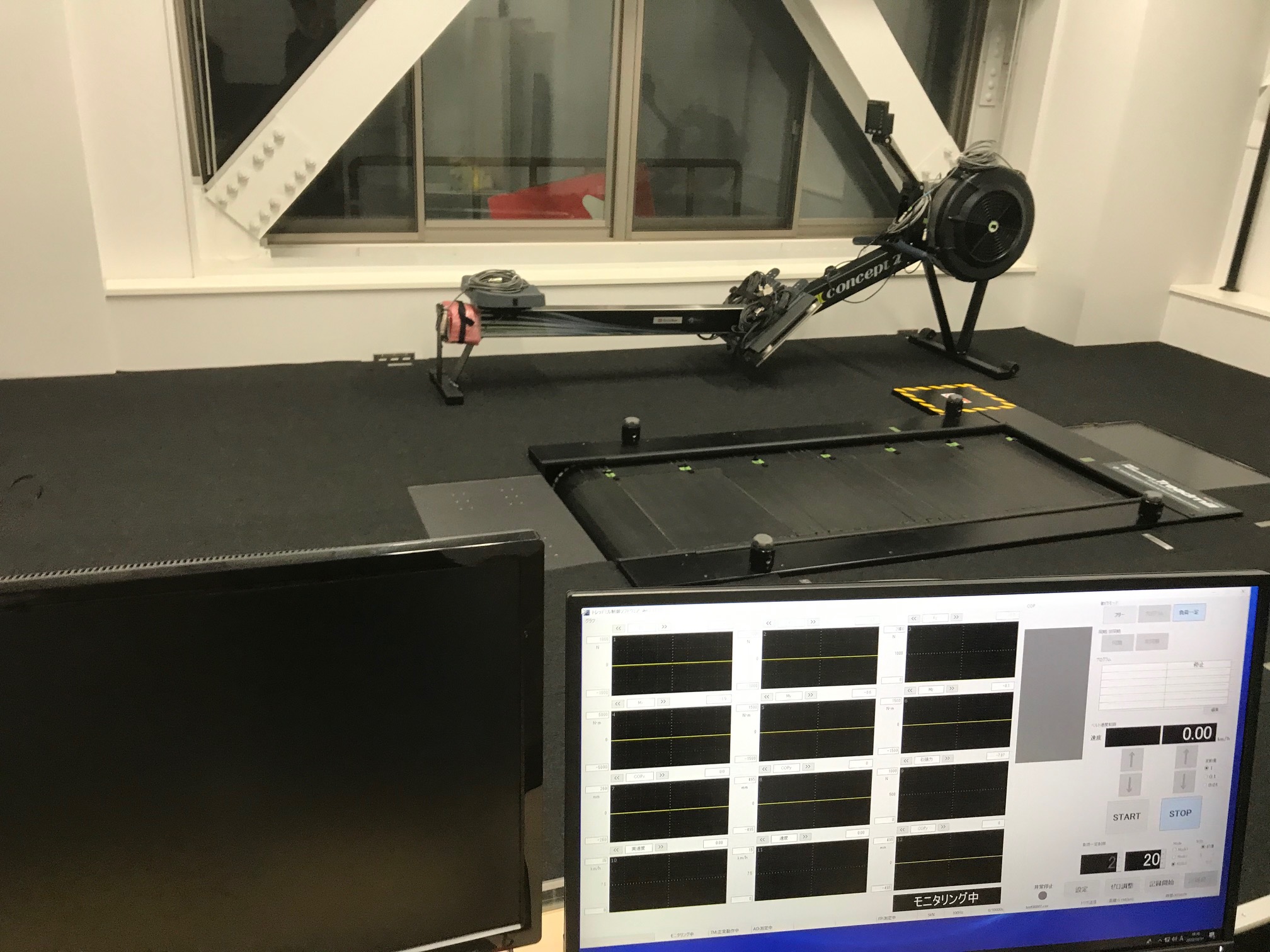
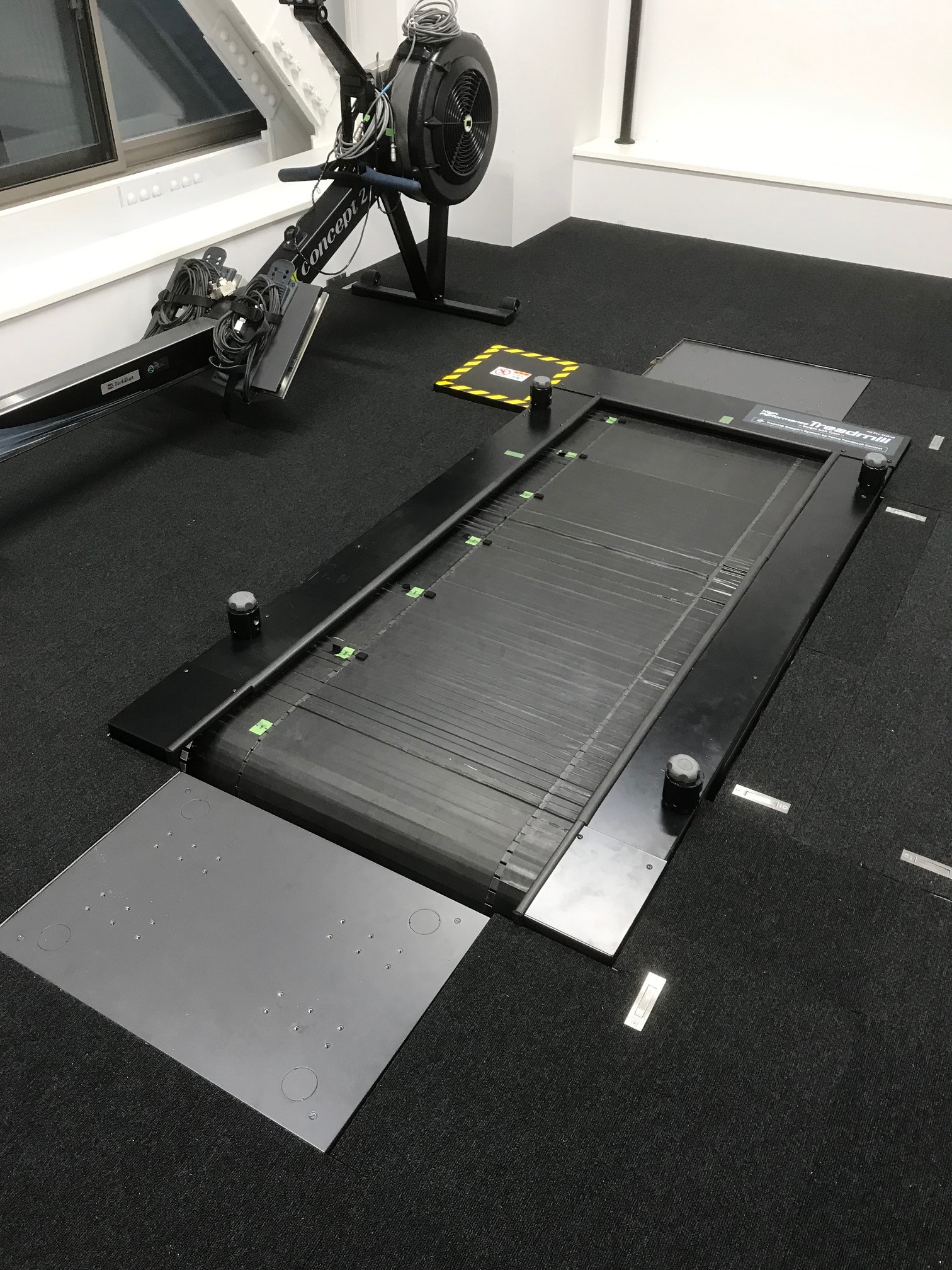
テック技販が新たに開発した ハイパフォーマンストレッドミルは、走行時の前後方向の床反力に依存して ベルト移動速度を操作する機構を取り入れることにより、より実際の 歩行・走行に近い動作を実現できるようになっています。(新機能:負荷制御機構搭載) 新型トレッドミル上で実施した動作および筋活動計測。
トレッドミルに取り付けられたフォースプレートにより、 前後方向の力を計測し、その力の情報をもとにベルト移動速度が決定する。 身体が前方に移動しないように、腰部を後ろから牽引している。 (牽引力も測定)
東京大学 野崎教授のご研究室(UTSSI Rowing Science Laboratory)内観



【大学研究所関連ページ】
■東京大学(東京都):野崎大地教授(野崎研究室)との共同研究のご紹介 vol1 フォースプレート 発揮力・踏む力測定装置 動作解析
■東京大学(東京都):野崎大地教授(野崎研究室)との共同研究のご紹介 vol2 新型トレッドミル 歩行センサ・走行センサ 動作解析
■東京大学(東京都):野崎大地教授(野崎研究室)との共同研究のご紹介 vol3 9軸モーションセンサー競技用ボート アスリート スポーツ
■東京大学(東京都):医用精密工学研究室 佐久間先生・小林先生カーボン素材の微小荷重検出フォースプレート 摩擦計測 触覚計測
■東京医科歯科大学:大きなステップ動作の計測(スポーツ等)に適した大型のフォースプレート TF-6090
■鹿屋体育大学(鹿児島県):フォースプレート50m走行路システムと野球フォースプレート計測システム
■鹿屋体育大学(鹿児島県):スポーツパフォーマンス研究センター論文情報 競技用ボートアスリート
■藤田医科大学(愛知県):藤田医科大学との共同開発により誕生した「リハビリテーション」に特化した製品も開発を行いました。
■大阪大学(大阪府):健康スポーツ科学講座木下先生。世界最小クラスの小型3軸力覚センサ。スポーツ用具、福祉機器、ロボット開発などに!
■大阪体育大学(大阪府):石川研究室負荷制御型トレッドミルの動画を追加。フォースプレート内蔵型トレッドミルHPT型
■立命館大学(京都府):フォースプレート内蔵型トレッドミルHPT型
■同志社大学(京都府):フォースプレート内蔵型トレッドミルHPT型
■名古屋工業大学(愛知県):田中先生のご紹介でFabCafe 渋谷さまに「ゆびレコーダー」を展示いただくことになりました。
■近畿大学(大阪府):機械工学科五百井先生。世界最小クラスの小型3軸力覚センサ。スポーツ用具、福祉機器、ロボット開発などに!
■国立研究開発法人産業技術総合研究所(茨城県):フォースプレート内蔵型トレッドミルHPT型
■国立研究開発法人産業技術総合研究所(茨城県):保原浩明主任研究員 トレッドミル論文等情報
※株式会社テック技販は、京都府に本社がある日本国内計測器メーカーで、一般企業をはじめ、大学や研究所でも弊社製品をご使用いただいております。また、大学との共同開発も行っております。
歩行センサ、歩行アシスト、歩行トレッドミル、多軸小型センサ・特殊ロードセル、計測器・データロガー、計測 制御ソフトウェア、試験 検査装置の設計、制作、特注品の製作など、お気軽にお問い合わせください。