


【HapLog】触覚・触感計測 Haptic skill logger

HapLog(Haptic skill logger)は指の爪側に装着して使用する計測器です。
指紋を露出した状態で計測可能ですのでモノをつかむ感覚(触感)を残したまま、把持力の計測が行えます。
操作力評価・ユーザビリティ―評価・教育やリハビリ効果の評価などにご利用頂けます。
化粧行動の数値化、職人技の数値化、パッケージの開封性など様々に応用可能です。
最近では技術伝承や技術伝達など技術スキルの可視化から一歩進んだ研究がされています。
特許登録番号 特許第5809452号
本製品はグッドデザイン賞を受賞しました

ピーチジョン様Youtubeより引用
特徴
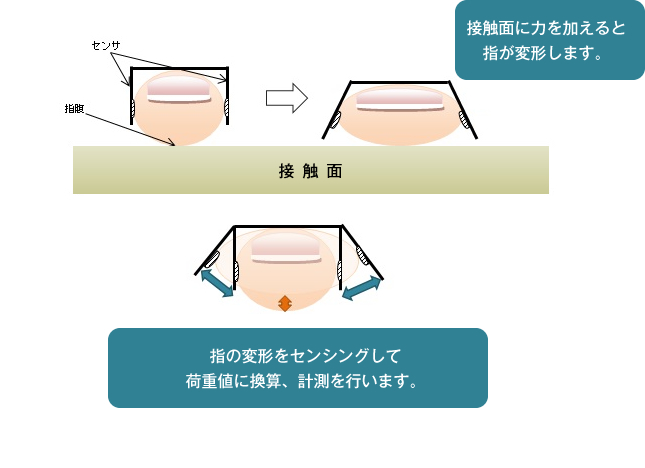
指腹を計測面に押し当てると、指腹が広がることで指が変形します。
この変形を、荷重に換算します。
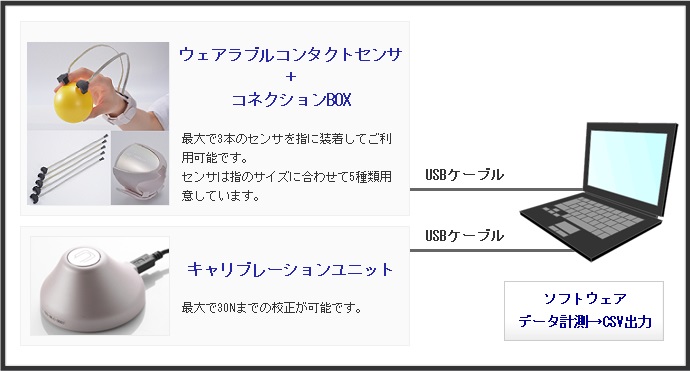
指の変形量は取り付けた人や状況により変わります。そのため専用キャリブレーションユニットを使い
荷重と変形量の相関関係をキャリブレーションし、結果をもとに計測を行います。
校正(個人差によるデータ取得)


専用のキャリブレーションユニットを押し込みます。
指の変形量と、そのときの荷重量の相関関係が計測され、このデータをキャリブレーションデータとします。
計測
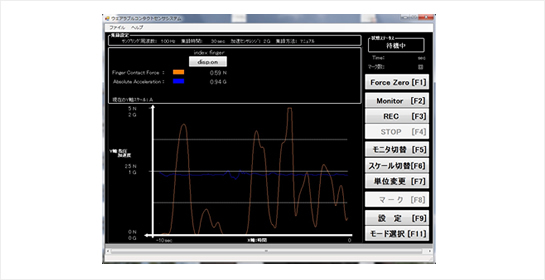
キャリブレーションデータを元に接触力を計測します。計測結果はCSVデータとして保存されます。
システム構成図
仕様表
| 型式 | HapLog |
|---|---|
| 構成 | ウェアラブルコンタクトセンサ×1(サイズは購入時指定) コネクションBOX、キャリブレーションユニット、接続用ケーブル(USBケーブル)×2 インストールCD、取扱説明書、収納BOX |
| [パソコン性能] | |
| 対象OS | Windows7・Windows8.1・Windows10 |
| CPU | Intel Core2 Duo 2.54GHz以上 |
| 接続 | USBポート×2 |
| [ウェアラブルコンタクトセンサ] | |
| バリエーション | 11mm、12mm、14mm、16mm、18mmの計5種類(内寸) |
| 内蔵センサ | ひずみ(システム上、キャリブレーションした結果の荷重値として表示)、加速度センサ(3軸) |
| [キャリブレーション ユニット] | |
| 定格容量 | 30N |
| 分解能 | 16bit |
| [オプション品] | |
| コネクションボックス外部トリガ対応(接点、IN) ※カメラ等との同期が可能になります。 |
|
カタログダウンロードはこちら▶HapLog
【柔らかさ触り心地計測関連製品】
触り心地の数値化、定量化、評価を行う計測器は、触覚計測・触覚提示、弾力測定などの計測が可能です。
細かい指使いをされる職人の動作なども数値化することが可能です。細かい動きを計測することで職人の感覚や技術を数値化定量化できます。
職人の技術技能伝承に役立てることが可能で、動きや動作、力加減など、勘や経験を後世に伝える一助となります。
材料の柔らかさや弾力を測定、評価することが可能です。
■【YAWASA】やわらかさ計測 柔軟計測 圧縮計測 弾力計測 汎用タイプ
■【HapLog】触覚・触感計測 Haptic skill logger
■【ゆびレコーダー】触覚伝達・触覚提示
■【触覚フォースプレート】摩擦計測 触覚計測
※指センサー・触覚センサー・触感計測器・触覚フォースプレートなどの特注品も可能です。
※株式会社テック技販は、京都府に本社がある日本国内計測器メーカーで、一般企業をはじめ、大学や研究所でも弊社製品をご使用いただいております。また、大学との共同開発も行っております。
多軸小型センサ・特殊ロードセル、計測器・データロガー、計測 制御ソフトウェア、試験 検査装置の設計、制作、特注品の製作など、お気軽にお問い合わせください。